卷积神经网络(Convolutional Neural Network,简称:CNN)
卷积的目的:为了从输入图像中提取特征。卷积可以通过从输入的一小块数据中学到图像的特征,并可以保留像素间的空间关系。
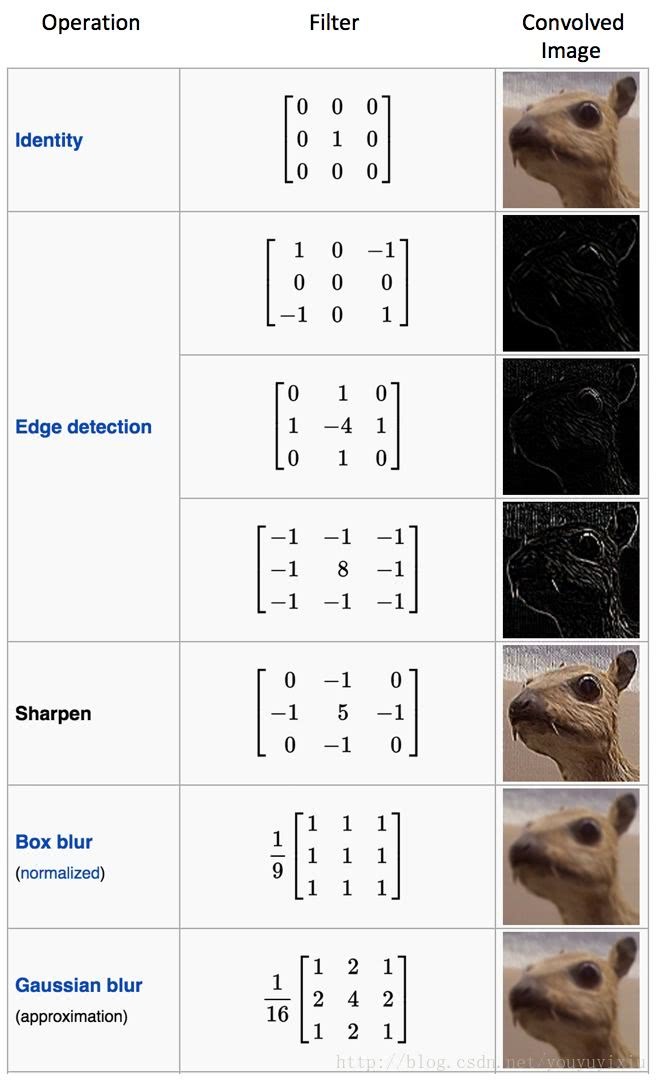
在 CNN 的术语中,3x3 的矩阵叫做“滤波器(filter)”或者“核(kernel)”或者“特征检测器(feature detector)”
常见的滤波器
特征图的大小(卷积特征)由三个参数控制:深度(depth)、步长(stride)、零填充(zero-padding)
深度:深度对应的是卷积操作所需的滤波器个数。在下图的网络中,我们使用三个不同的滤波器对原始图像进行卷积操作,这样就可以生成三个不同的特征图。你可以把这三个特征图看作是堆叠的 2d 矩阵,那么,特征图的“深度”就是三。
步长:步长是我们在输入矩阵上滑动滤波矩阵的像素数。当步长为 1 时,我们每次移动滤波器一个像素的位置。当步长为 2 时,我们每次移动滤波器会跳过 2 个像素。步长越大,将会得到更小的特征图。
零填充:有时,在输入矩阵的边缘使用零值进行填充,这样我们就可以对输入图像矩阵的边缘进行滤波。零填充的一大好处是可以让我们控制特征图的大小。使用零填充的也叫做泛卷积,不适用零填充的叫做严格卷积。
卷积的过程
非线性单元(ReLU)
ReLU 是一个元素级别的操作(应用到各个像素),并将特征图中的所有小于 0 的像素值设置为零。
池化或亚采样
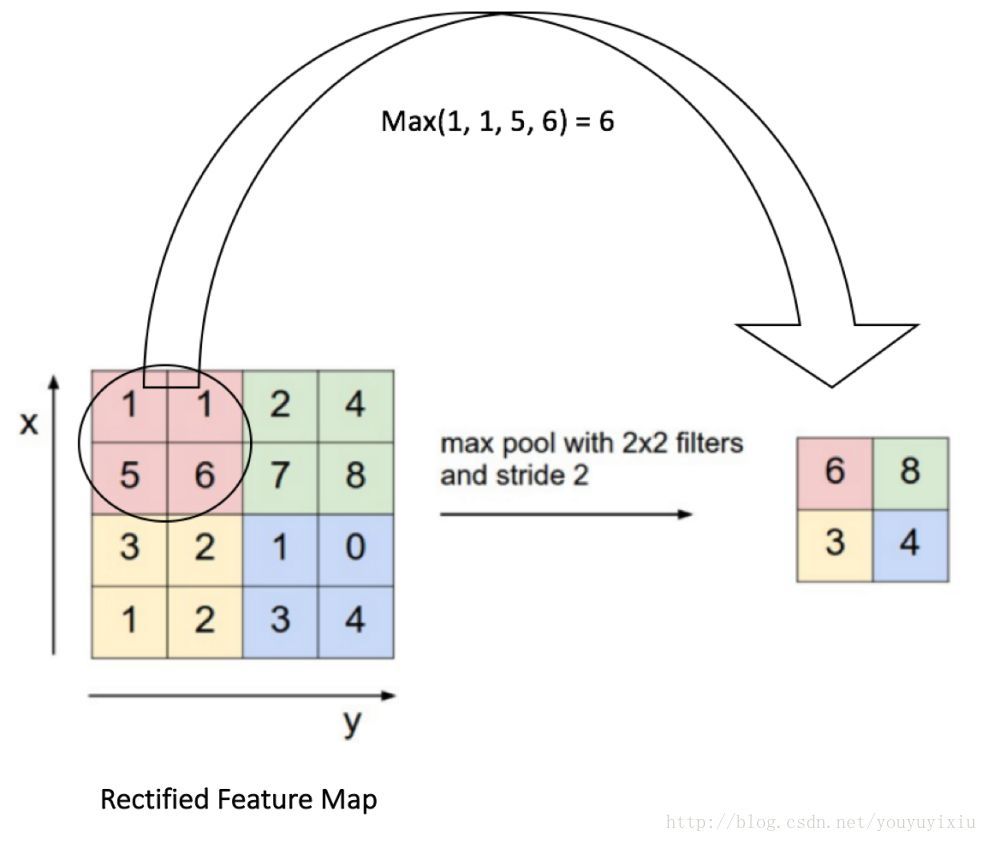
空间池化(Spatial Pooling)(也叫做亚采用或者下采样)降低了各个特征图的维度,但可以保持大部分重要的信息。空间池化有下面几种方式:最大化、平均化、加和等等。
使输入表示(特征维度)变得更小,并且网络中的参数和计算的数量更加可控的减小。
对于最大池化(Max Pooling),我们定义一个空间邻域(比如,2x2 的窗口),并从窗口内的修正特征图中取出最大的元素。除了取最大元素,我们也可以取平均(Average Pooling)或者对窗口内的元素求和。在实际中,最大池化被证明效果更好一些。
全连接层
卷积和池化层的输出表示了输入图像的高级特征。全连接层的目的是为了使用这些特征把输入图像基于训练数据集进行分类。除了分类,添加一个全连接层也(一般)是学习这些特征的非线性组合的简单方法。从卷积和池化层得到的大多数特征可能对分类任务有效,但这些特征的组合可能会更好。全连接层得到的输出概率和为 1。这个可以在输出层使用 softmax 作为激活函数进行保证。softmax 函数输入一个任意大于 0 值的矢量,并把它们转换为0~1之间的数值矢量,其和为1。